設(shè)備概況
型號(hào):WS-CXF-250
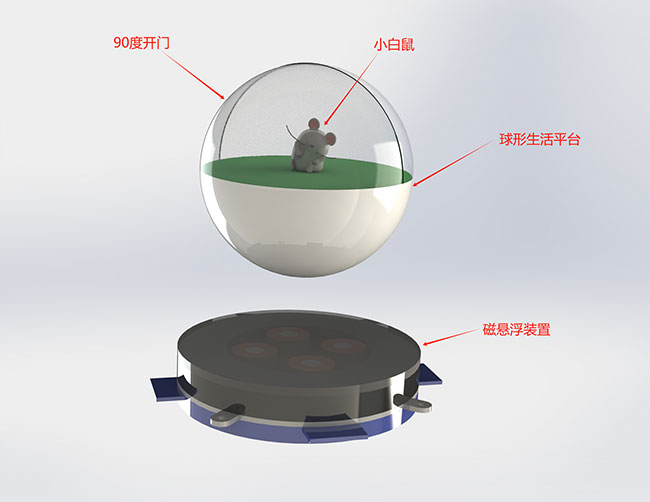
將小白鼠圈養(yǎng)在球形生活平臺(tái)內(nèi)�。采用磁懸浮原理���,使得球形平臺(tái)懸浮空中�����。
設(shè)備模塊化設(shè)計(jì)���,1個(gè)球形平臺(tái)生活1只小白鼠,配備一套磁懸浮裝置���。
如需對(duì)多個(gè)小白鼠進(jìn)行試驗(yàn),則將多套試驗(yàn)機(jī)一起使用即可�。
并且擴(kuò)展性強(qiáng),可附加其他模塊�����,以加強(qiáng)試驗(yàn)?zāi)芰?���,如生物監(jiān)測(cè)監(jiān)控,溫濕度環(huán)境控制等�����。
2. 技術(shù)參數(shù)
(1) 球形生活平臺(tái):內(nèi)徑250mm。球內(nèi)附加水平平臺(tái)用于小白鼠生活�。
(2) 懸浮原理:磁懸浮。
3. 磁懸浮原理與計(jì)算解析
3.1. 電磁力計(jì)算基礎(chǔ)
磁懸浮系統(tǒng)的核心在于電磁力與重力的平衡�。以下為關(guān)鍵計(jì)算模型:
?電磁吸引力(EMS系統(tǒng))?
計(jì)算公式:
Fem=μ0N2AI2/4d2
其中,μ0為真空磁導(dǎo)率(4π×10?7?H/m)���,N為線圈匝數(shù)���,A為磁極面積,I為電流�����,d為懸浮間隙����。通過調(diào)節(jié)電流強(qiáng)度實(shí)現(xiàn)間隙穩(wěn)定(典型值8-12mm)?。
?超導(dǎo)排斥力(EDS系統(tǒng))?
基于楞次定律���,運(yùn)動(dòng)超導(dǎo)磁體在鋁制軌道中感應(yīng)渦流�����,產(chǎn)生反向磁場(chǎng)形成的斥力:
Fed=B2A/2μ0
式中B為磁感應(yīng)強(qiáng)度���,A為有效作用面積�����。懸浮間隙可達(dá)10-30cm?��。
3.2. 控制算法與穩(wěn)定性分析
?PID閉環(huán)控制?
懸浮間隙調(diào)節(jié)采用PID算法:
u(t)=Kpe(t)+Ki∫e(t)dt+Kdde(t)/dt
參數(shù)整定需滿足相位裕度>45°�����,帶寬>100Hz����,響應(yīng)時(shí)間<10ms?��。
?多自由度協(xié)同控制?
橫向?qū)蛄εc縱向推進(jìn)力耦合方程為:
{mx=Fx?Fdrag my=Fy+Flateral
需通過卡爾曼濾波器消除軌道不平順擾動(dòng)���,定位精度要求±1mm?67。
3.3. 能量損耗量化分析
?電磁懸浮能耗?
功率損耗主要來自線圈電阻:
Ploss=I2R+B2fV/μ0σ
其中R為線圈電阻����,f為磁場(chǎng)交變頻率����,V為磁芯體積�,σ為材料電導(dǎo)率。EMS系統(tǒng)典型功耗為3-5kW/噸��。
?超導(dǎo)系統(tǒng)冷卻能耗?
液氦制冷功率需求:
Pcool=Qleak/ηcryo
漏熱Qleak與絕熱層厚度成反比���,商用超導(dǎo)磁懸浮制冷效率約15%-20%?��。
4. 系統(tǒng)設(shè)計(jì)原理
4.1. ?磁懸浮模塊?
?懸浮機(jī)制?:采用電磁懸浮(EMS)技術(shù)����,通過可調(diào)節(jié)電流的電磁鐵陣列實(shí)現(xiàn)小白鼠無接觸懸浮���,磁場(chǎng)強(qiáng)度與重力平衡關(guān)系滿足:
Fm=μ0N2AI2/4d2≥mmouse?g
其中����,mmouse為小白鼠質(zhì)量(約20-40g)����,懸浮間隙d控制在5-10mm范圍內(nèi),通過PID算法實(shí)時(shí)調(diào)節(jié)電流以維持穩(wěn)定懸浮?。
?磁場(chǎng)配置?:采用環(huán)形電磁鐵陣列(4-6組)�,垂直磁場(chǎng)強(qiáng)度梯度≥0.5T/m,水平方向設(shè)置輔助磁場(chǎng)抑制側(cè)向偏移�。
4.2. ?動(dòng)態(tài)行為監(jiān)測(cè)?
?運(yùn)動(dòng)軌跡捕捉?:集成微型加速度計(jì)(采樣率≥100Hz)與紅外光柵陣列(精度±0.1mm),實(shí)時(shí)記錄小白鼠肢體活動(dòng)軌跡及位移�����。
?生理參數(shù)監(jiān)測(cè)?:通過非接觸式光纖傳感器監(jiān)測(cè)心率(50-700bpm)與呼吸頻率(20-300次/分)��,數(shù)據(jù)同步至控制終端����。
5. 核心功能模塊
5.1. ?環(huán)境模擬系統(tǒng)?
?磁場(chǎng)強(qiáng)度調(diào)節(jié)?:支持0.1-5.0T連續(xù)可調(diào)磁場(chǎng),通過PWM控制電磁鐵電流(0-10A)�����,模擬不同重力條件(如0.1g-2g)�。
?溫濕度控制?:內(nèi)置恒溫模塊(20-30℃±0.5℃)與濕度調(diào)節(jié)器(30-70%RH±5%),適應(yīng)長(zhǎng)期實(shí)驗(yàn)需求���。
5.2. ?安全保護(hù)機(jī)制?
?緊急制動(dòng)?:懸浮失效時(shí)自動(dòng)啟動(dòng)機(jī)械托架(響應(yīng)時(shí)間<50ms)����,防止小白鼠跌落損傷���。
?刺激閾值保護(hù)?:動(dòng)態(tài)限制電磁場(chǎng)變化速率(ΔB/Δt≤0.1T/s)���,避免過度應(yīng)激反應(yīng)。
6. 硬件與軟件架構(gòu)
6.1. ?硬件配置?
?懸浮平臺(tái)?:直徑200mm圓形平臺(tái)��,采用輕量化鈦合金框架(總重<5kg)��,內(nèi)置電磁鐵組與傳感器陣列����。
?控制單元?:基于STM32H7微控制器,集成16位ADC(采樣率1MHz)與CAN總線通信模塊����。
6.2. ?軟件系統(tǒng)?
?實(shí)時(shí)控制算法?:采用改進(jìn)型模糊PID控制器,調(diào)節(jié)周期≤1ms�����,相位裕度>60°�,帶寬>200Hz。
?數(shù)據(jù)分析模塊?:支持運(yùn)動(dòng)軌跡可視化(3D建模)與生理參數(shù)相關(guān)性分析(如活動(dòng)強(qiáng)度與心率變化曲線)��。
7. 實(shí)驗(yàn)流程設(shè)計(jì)
7.1. ?適應(yīng)性訓(xùn)練階段?
初始懸浮高度設(shè)定為5mm,磁場(chǎng)強(qiáng)度梯度0.3T/m���,持續(xù)30分鐘/天����,連續(xù)3天觀察行為適應(yīng)性與應(yīng)激反應(yīng)?����。
7.2. ?生存能力測(cè)試?
?靜態(tài)懸浮測(cè)試?:在1g模擬重力下連續(xù)懸浮24小時(shí),記錄能量消耗(通過運(yùn)動(dòng)位移換算)與進(jìn)食/飲水行為�。
?動(dòng)態(tài)應(yīng)激測(cè)試?:施加周期性磁場(chǎng)擾動(dòng)(頻率0.1-10Hz),評(píng)估運(yùn)動(dòng)恢復(fù)速度與生理指標(biāo)波動(dòng)?�。
驗(yàn)儀器科技有限公司")